

YVT-35LX-F03D范围传感器日本北阳HOKUYO
简要描述:
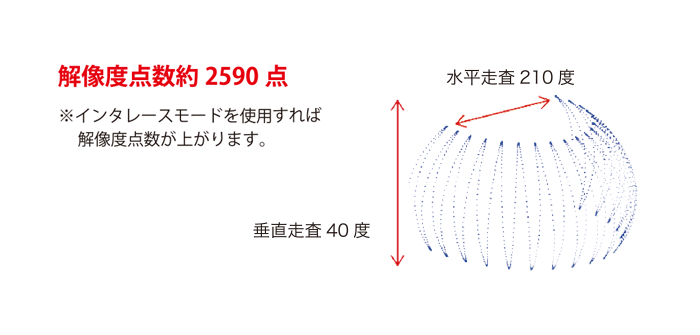
YVT-35LX-F03D范围传感器日本北阳HOKUYO距离传感器3D范围传感器(3D LiDAR)激光扫描仪,可测量35 m(大),水平210°和垂直40°的范围。使用*的扫描方法,在垂直方向上几乎没有遗漏,并输出了2590点(多518000点)的丰富点组数据。配备了方便的功能,例如IMU和PPS输入。用于机器人和AGV(无人运输车)的环境识别(SLAM)应用。ROS兼容。
产品型号:
产品时间:2025-05-20
 打印当前页
打印当前页YVT-35LX-F03D范围传感器日本北阳HOKUYO
距离传感器
3D范围传感器(3D LiDAR)激光扫描仪,可测量35 m(大),水平210°和垂直40°的范围。使用*的扫描方法,在垂直方向上几乎没有遗漏,并输出了2590点(多518000点)的丰富点组数据。配备了方便的功能,例如IMU和PPS输入。用于机器人和AGV(无人运输车)的环境识别(SLAM)应用。ROS兼容。
YVT-35LX-F03D范围传感器日本北阳HOKUYO
产品概要

●测距原理采用脉冲光的TOF方法。
●可以照射各种3D激光,并测量难以在2D中测量的宽度,深度和高度。
我们已经发布了一个库,可以将获取的距离测量数据转换为X / Y / Z坐标。
宽范围测量
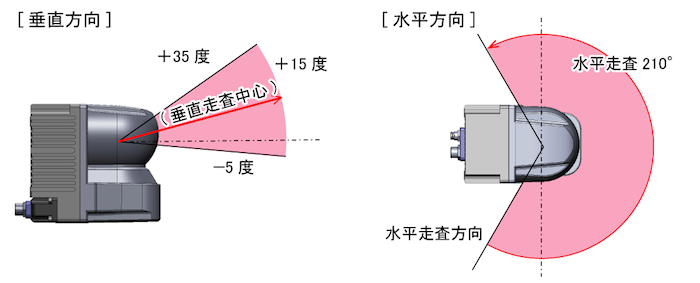
它以水平方向210°和垂直方向40°照射宽范围的激光,并输出通过反射光获取的点组数据。
向前的检测距离为35m,横向的检测距离为14m,实现了远距离性能。
产品介绍视频
使用隔行扫描模式功能提高分辨率得分
此功能可移动每个周期的激光束照射位置,并增加点组的数量以提高分辨率。
密度可以在水平方向上增加多达20倍,在垂直方向上增加多达10倍。
*以大浓度设置HD(高密度)模式。
支持户外使用的多回声
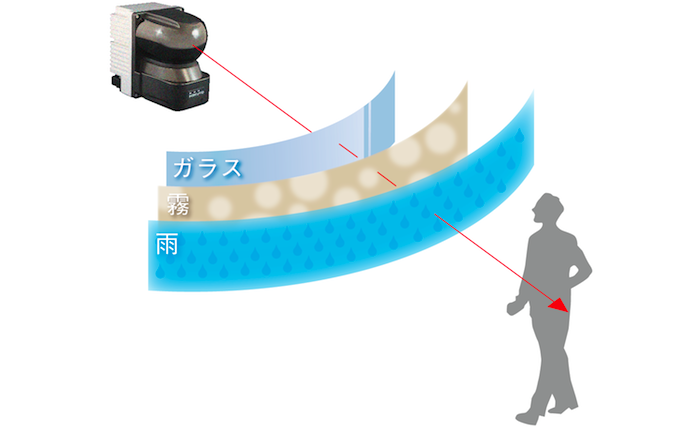
此功能可以接收多个回声(反射光),例如雨和雾,以在一个方向上进行距离测量,并从每个方向获取距离数据。
有效分离雪,雨,尘埃等漂浮物和户外用前盖。
本产品与4个回声兼容。
配备IMU(陀螺仪)传感器,可轻松从姿势数据校正3D数据
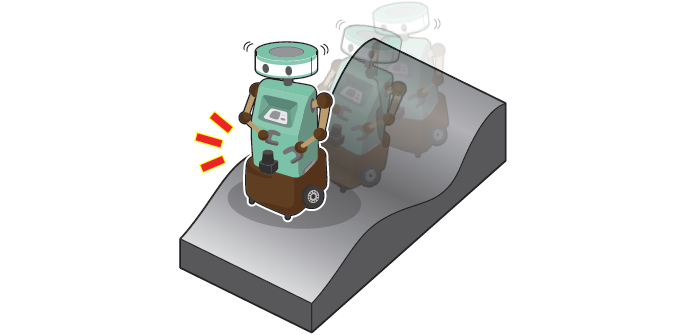
检测角速度和加速度。由于它是内置IMU,因此不需要时间校正。
当机器人或无人搬运车在斜坡上行驶时,可以知道倾斜(姿态)和加速度,因此可以根据情况进行控制。
*使用InvenSense MPU-6500。
有关详细数据,请参阅制造商的目录。
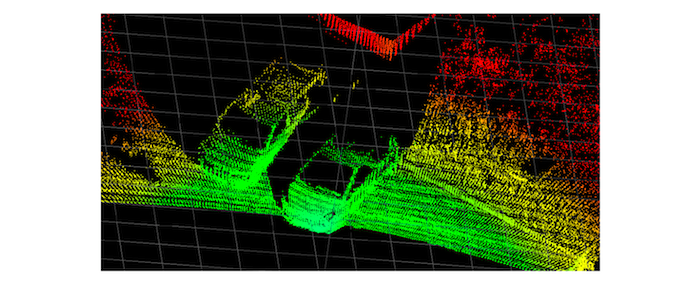
扫描图像
具有优异的耐环境性
防护结构IP67,环境照度100,000lx,耐冲击性10G,适用于各种环境。
PPS(每秒脉冲)输入
当与GPS结合使用时,PPS信号会重置传感器时间戳,以消除累积误差。